| |
Three kinds of exercises are possible with this device:
1. Sit to stand
with joint knees, motion only in the sagittal plane, as sitting and raising up from a chair;
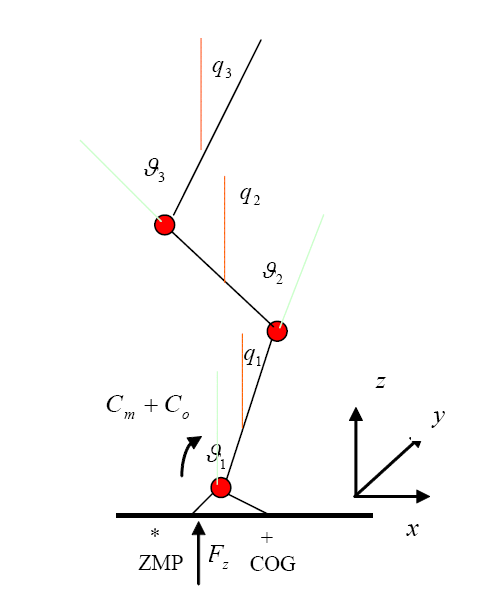
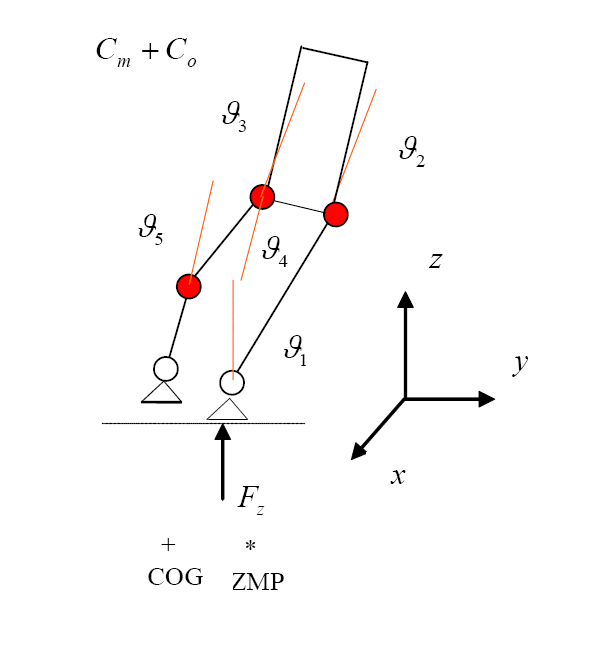
3 independent controlled joints for each leg, each with one degree of freedom (hip, knee, and ankle), feet fixed on the ground. Leaning forward during a sit to stand exercise.
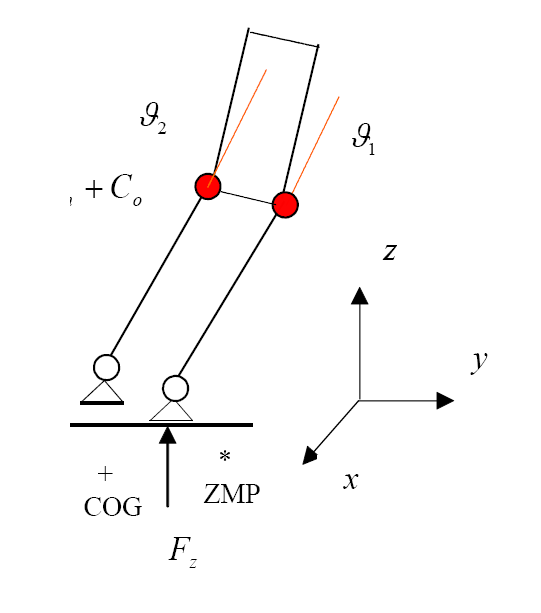
2. Balancing the weight
motion on the frontal plane, 1 degree of freedom with control on the hip joints for transferring the weight from one foot to the other.
3. Step machine
classical step machine, with transfer of weight from one foot to the other, balance on the supporting foot and raising of the swing foot. Joints with two degrees of freedom at the ankle and hip with the control of 5 joints.
|
|